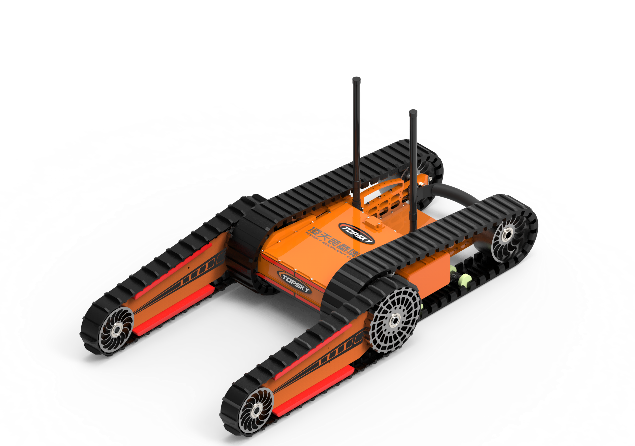
Малий робот-розвідник пожежної техніки RXR-C10D


| Роботи пожежної розвідки в основному використовуються для заміни штучно наближених до легкозаймистих, вибухонебезпечних, складних та інших суворих середовищ для розвідки навколишнього середовища та виявлення газів. Вони також можуть використовуватися для розвідки у невеликих та низьких просторах, таких як днище кузова автомобіля та нижня частина полиці. Шасі має конструкцію гусеничного шасі + переднього подвійного поворотного маневрового важеля, яка може долати вертикальні перешкоди висотою до 280 мм, та може підніматися на платформу висотою 360 мм, що дозволяє адаптуватися до різних типів місцевості для швидкого бойового розгортання. Багатофункціональний інтерфейс розширення може бути оснащений різними модулями кузова. Водночас робот оснащений дротовим керуванням, яке може працювати дистанційно через дроти за умови перешкод сигналу. Подвійні поворотні маневрові важелі робота можна вільно розбирати, що дозволяє використовувати їх у різних сценаріях. |
| 2.Особливості |
| 1. Розумний пульт дистанційного керування Багатофункціональна кнопка розширення Візуалізація операцій на великому екрані 2. Модуляризація всієї машини Модулізація шасі, модуляризація акумулятора, модуляризація підвіски 3. Відмінні показники у скелелазінні, підйомі сходами, подоланні перешкод та перетині траншей Може підніматися на схили з кутом 45 градусів Може підніматися сходами з кутом нахилу 40 градусів Може підніматися на вертикальні перешкоди висотою 28 см Може перекривати траншеї шириною 41 см 4. Відеосистема 3-точковий режим зв'язку, для вирішення звичайних операцій у невізуальному середовищі, відстань зв'язку 1 км 2-канальна HD-камера 5. Кілька модулів розширення Модуль лідара, модуль виявлення газу, модуль розвідувального карданного підвісу, модуль роботизованої руки
Чотири розширені авіаційні штекерні порти, зарезервовані RS232, RS485, CAN, мережевий порт, 24 В, 12 В (нормально замкнуті)
|
| 3.Ттехнічні параметри3.1 Весь робот: 1. Назва: Малий робот-розвідник пожежної безпеки RXR-C10D (B) 2. Модель: RXR-C10D 3. Основна функція: функція відеорозвідки 4. Рівень захисту: рівень захисту всього робота становить IP67 5. Живлення: електричне, потрійний літієвий акумулятор 6. Розмір: ≤довжина 610 мм × ширина 490 мм × висота 200 мм (без антени) 7. Діаметр повороту: обертання на місці 8. Вага: ≤25 кг 9. Максимальна лінійна швидкість: ≥2,7 м/с, безступінчаста швидкість дистанційного керування 10. Величина прямолінійного відхилення: ≤5% 11. Здатність до скелелазіння: ≥45° 12. Здатність до підйому: ≥40° 13. Висота перетину перешкод: ≥280 мм 14. Час безперервної ходьби: ≥2 год 15. Відстань бездротового пульта дистанційного керування: 500 м (у відкритому стані) 16. Відстань бездротової передачі відео: 500 м (відкритий) двоточковий зв'язок; 800 м (відкритий) триточковий зв'язок для відповідності сценам оклюзії (необов'язково); 17. Відстань дротового пульта дистанційного керування: 100 м 18. Відстань передачі відео по дротовому з'єднанню: 100 м 19. Робот-краулер: Робот-краулер має бути виготовлений з вогнестійкої, антистатичної та стійкої до високих температур гуми, з кевларом всередині, з конструкцією захисту від сходу з рейок.
3.2 Сприйняття відео роботом: 1. Кількість та конфігурація камер: Дві камери високої чіткості на корпусі можна спостерігати та керувати ними одночасно, а навколишнє середовище навколо сцени може стабільно відображатися на пульті дистанційного керування, що може задовольнити бездротове керування роботом та значно підвищити ефективність бою. 3.3 Параметри конфігурації терміналу дистанційного керування 1. Розміри: 362*188*40 (без урахування висоти коромисла) 2. Вага всієї машини: 2,5 кг 3. Дисплей: не менше 10 дюймів РК-екран високої яскравості, 4 канали перемикання відеосигналу 4. Платформа системи керування: операційна система window10 5. Робочий час: 2 год (безперервно) 6. Основні функції: Пульт дистанційного керування та монітор є інтегрованими та портативними, за ними можна одночасно спостерігати та керувати, а навколишнє середовище навколо сцени може стабільно відображатися для віддаленого оператора. (Додаткова функція) Відображення в режимі реального часу заряду акумулятора кузова транспортного засобу та пульта дистанційного керування, пройденої відстані та іншої інформації, а також можливість керування рухами робота вперед, назад та кермуванням. Спосіб передачі даних – бездротова передача з використанням зашифрованого сигналу. 7. Функція запису та відтворення відео: відео можна записувати будь-коли, а записаний відеоконтент можна автоматично зберігати, а відео можна відтворювати безпосередньо на терміналі дистанційного керування або копіювати на інші пристрої. 8. Функція керування ходьбою: Так, 1 джойстик реалізує гнучке керування роботом вперед, назад, поворот ліворуч та поворот праворуч 9. Перемикач відео: Так, самоскидаючийся поворотний перемикач 10. Функція керування освітленням: Так, тумблер
4.4 Інше: 100-метрова котушка дротового зв'язку Довжина: 100 мм |
| 4.Конфігурація продукту |
| 1. Малий робот-розвідник пожежної безпеки RXR-C10D (B) 1 комплект 2. Пульт дистанційного керування (включно з батареєю) 1 комплект 3. Зарядний пристрій для пульта дистанційного керування (12,6 В) 1 шт. 4. Зарядний пристрій для корпусу робота (25,2 В) 1 шт. 5. Антена передачі зображення 1,4 ГГц, 4 шт. 6. Дротовий зв'язок, котушка 100 метрів, 1 шт. 7. Допоміжні інструменти 1 комплект |